机械论文:汽车电子机械制动系统的分析
来源:未知 08-24
随着世界范围内的能源问题、环境污染问题影响力不断扩大,近年来国内外学界在新能源电动汽车领域开展了大量研究,汽车电子机械制动系统便是这类研究所关注的重要领域,基于此
机械论文:汽车电子机械制动系统的分析
【摘要】 随着世界范围内的能源问题、环境污染问题影响力不断扩大,近年来国内外学界在新能源电动汽车领域开展了大量研究,汽车电子机械制动系统便是这类研究所关注的重要领域,基于此,本文就汽车电子机械制动系统的主要发展条件和要求展开分析,并对汽车电子机械制动系统的设计、汽车电子机械制动系统的优化分析进行了详细论述,希望由此能够为相关业内人士带来一定启发。
【关键词】 汽车电子机械制动系统;电动汽车;动力学模型
引言
虽然近年来德国Bosch公司、清华大学搭建的电子机械制动试验台均收获了一定关于汽车电子机械制动系统的研究成果,但该系统本身仍存在的技术不足却使得其很难在短时间内真正进入市场,而为了加快汽车电子机械制动系统的研发速度与产业化应用步伐,正是本文就汽车电子机械制动系统展开具体研究原因所在。
二、汽车电子机械制动系统的主要发展条件和要求
之所以汽车电子机械制动系统的研发受到学界的高度关注,主要是由于当下应用广泛的液压控制制动系统技术虽然已经发展的较为成熟,但其并不能完全满足人们对汽车安全性能提出的较高要求,这也是近年来新能源电动汽车领域致力于开展电子机械制动系统研究的原因所在,防抱死制动便属于其中的典型。由于近年来汽车制动系统的管路设计日渐复杂化与多样化,这就使得汽车设计与生产在制动系统领域往往面临着较大的难度,较为复杂的管路设计则进一步降低了液压控制制动系统技术的可靠性,由此可见汽车行业对制动精准、反应灵活、功能全面汽车制动存在的较高需求,电子机械制动系统在汽车领域发展中所占据的重要地位可见一斑[1]。
三、汽车电子机械制动系统的设计
为提升研究的可借鉴性价值,本文就较为典型的汽车电子机械制动系统设计展开了详细论述,这一论述中的汽车电子机械制动系统主要由控制驱动单元、机械手刹拉杆、电制动器、轮速传感器、电子驻车开关、电子制动踏板共六部分组成,而其机械部分则主要由制动卡钳、刹车盘、减速齿轮、电磁离合器、刹车片、制动电机等部分组成
(一)总体设计思路
当汽车电子机械制动系统检测到点火开关信号时,其就会自动开展静态自检并启动车辆,静态自检状态将一直持续到车辆速度超过10km/h后,而行车过程中通过控制策略算法统合踏板位移、电子驻车开关、集电制动踏板开关等信号,即可在运算与判断下得出输出控制的目标值,而将这一目标值与控制量MCY单元实现结合,便能够完成高质量的电磁离合器、驱动电路等单元的控制,由此实现的转动到移动的转换便为活塞缸的刹车片提供了动力,汽车的高质量制动由此就得以实现[1]。
(二)机械设计
机械设计属于汽车电子机械制动系统设计的重要组成,这一设计在运行中主要负责转动到移动的转化、活塞的推进,刹车片由此才能够真正在作用力作用下服务于车辆制动,不过这一过程中可能出现制动电机输出关闭、非自锁机构自动反退的现象,夹紧力的自动卸载便会影响汽车电子机械制动系统的制动性能,因此本文研究在机械设计中应用了电磁离合器避免该现象出现。
(三)系统硬件设计
汽车电子机械制动系统硬件设计主要围绕驱动电路与控制电路两部分开展,其中前者可以细分为电磁离合器驱动控制电路与电机驱动控制电路,后者则由监控MCU与主MCU组成,控制电路由此才得以实现轮速信号、驻车中断信号、电机反馈电流信号等一系列输入信号的采集。在控制电路的具体工作中,主MCU与从MCU能够通过模拟开关实现对电磁离合器的输出控制与电机的输入控制,因此本文在硬件设计中选择了MPC5604的32位处理器和MC9S08DZ128的8位处理器,而通过2路模拟开关负责驻车信号与制动踏板信号的采集,16路开关信号负责4路电磁离合器的控制,SPI通信负责主MCU之间的相互监控,汽车电子机械制动系统对硬件领域的需求便能够得到基本满足。值得注意的是,为了防备主MCU出现故障影响电子机械制动系统的制动性能,SPI通信将实现监控MCU的控制权接管,由此各个通道仍将正确发挥作用,而故障发生时整车的CAN通信接口将为MCU提供相关信息,由此有效的故障报警便得以实现[3]。
(四)系统软件设计
汽车电子机械制动系统的软件设计需要得到三种算法的支持,即系统冗余控制算法、驻车制动控制算法以及常规制动控制算法,三种算法也可以称得上是其软件设计的核心,因此本文主要对三种算法的具体应用进行了深入论述。
1.系统冗余控制算法
系统冗余控制算法主要负责电子机械制动系统中的冗余控制,其主要应用于监控MCU与主MCU,而由于MCU之间的通信需要得到SPI通信的支持,这就使得系统冗余控制算法能够判断接收的数据是否为提前设置好的数据,由此即可实现系统运行是否正常的判断。通过系统接收相关数据过程中发现的数据差异,即可判断系统具体出现的故障形式,主MCU故障一旦发生监控MCU便将启动故障报警并接管控制权,电子机械制动系统的安全运行在系统冗余控制算法的支持下便能够得到高质量保障。
2.驻车制动控制算法
驻车制动控制算法的应用需要涉及电子机械制动系统控制电路采集的相关信号,通过对其中点火开关信号、轮速信号等信号的分析,驻车制动控制算法就能够判断汽车所处状态,驾驶者的制动操作实现也将在驻车制动控制算法支持下综合分析车辆的驻车状态、相关按钮开关等信息,这些对新能源电动汽车的发展能够带来极为积极的影响。
3.常规制动控制算法
常规制动控制算法主要结合汽车驾驶员对制动踏板的控制实现对其意图的准确判断,这一判断能够在采集制动踏板信息后实现电子制动踏板、整车踏板的位移分配比例确定,前后轮制动力由此实现的合理分配便能够为电子机械制动系统的性能发挥提供有力支持。具体来说,常规制动控制算法能够结合制动效率与电制动器减速比进行电机输出的扭矩计算,电机输出扭矩曲线与堵转电流也是计算的重要组成内容,以此实现的高精度闭环控制便满足了电子机械制动系统对软件控制的需要[4]。
四、汽车电子机械制动系统的优化分析
为了进一步提升研究价值并为业内人士的电子机械制动系统研发提供启发,本文基于simulink软件与上文研究对电子机械制动系统开展了仿真分析,这一分析便能够为设计的优化实现提供支持。
(一)车况信息选择
仿真分析开展前首先需要确定具体的车况信息选择,因此本文选择了BJ1041货车作为研究对象,这一货车的主要参数为总质量为3074kg、质心高度为0.95hg/m、质心到前轴距离为1.947a/m、质心到后轴线距离为1.253b/m、前后轴的制动力分配比为为0.38。
(二)动力学模型建立
在汽车电子机械制动系统的仿真分析中,这一分析首先需要建立整车动力学模型、轮胎模型以及制动系统模型。
1.整车动力学模型
考虑到研究重点整车动力学模型的建立忽视了空气阻力、侧向风、轮胎弹性阻尼等方面的影响,本文将汽车视作一个刚体,图1为研究建立的1/2整车受力模型,该模型假设车辆行驶在无风路面上。结合图1可得出制动微分方程,即:
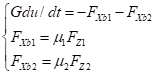
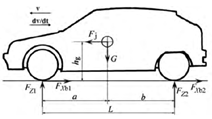
图 1 1/2整车受力模型
上述模型包含了汽车质量、车速、时间、车轮地面制动力与附着系数等内容,结合该模型便能够求出力矩及旋转运动微分方程、汽车在车轮抱死拖滑时的运动方程,图2为由此得出的整车动力学模型。
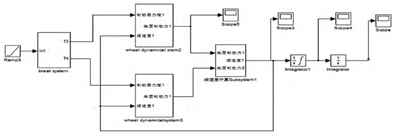
图 2 整车动力学模型
2.轮胎模型
轮胎模型的建立需要得到魔术公式的支持,这一公式在三角函数公式支持下能够实现轮胎实验数据的拟合,纵向摩擦系数、曲率因子、曲线形状因子等均属于魔术公式 的重要组成,由此即可建立轮胎模型。
3.制动系统模型
制定系统模型的建立需要结合制动器的制动力矩, 便可用于制动力矩的计算,这一计算需要应用制动效能因数、制动气室膜片面积以及制动器的工作效率,其中的效率取0.85,由此即可确定传递函数 ,最终可得 ,结合该函数便可以开展制动系统模型的建立。
(三)仿真分析
应用Simulink软件开展的仿真分析需要得到四阶—五阶Runge—Kutta算法的支持,仿真前确定制动初始状态为80km/l,选择ODE45作为求解器Solver的选择,由此即可开展具体的仿真,仿真求得了前轮滑移率变化、后轮滑移率变化、车速与前轮轮速变化、车速与后轮轮速变化、整车减速度变化、制动距离变化、纵向附着系数与滑移率变化,而结合这一系列结果开展分析,笔者得出了以下几点分析结果:(1)前后轮迅速抱死拖滑。通过对比前轮与后轮滑移率变化可以清楚发现,二者均在短时间内升至100%,前路则稍领先于后轮,由此可见上文研究能够满足汽车的真实需要。(2)车轮抱死导致减速度不变。在对车速与前、后轮变化展开的分析中不难发现,无论是前轮还是后轮,二者均在短时间内降为0,前轮与后轮的轮速则在其后匀降至0,由此可见本文研究电子机械制动系统的可靠性与实用性。(3)车辆减速度变化。在对整车减速度变化展开的分析中不难发现,电子机械制动系统应用中的车辆减速度首先迅速增至-9m/s2,随后则稳定在-7.5m/s2。(4)制动所需时间与距离。结合制动距离变化可得出电子机械制动系统的完全制动需要耗时3.5s,移动的距离则为42.16m,由此可见该制动系统的性能(5)稳定性分析。通过分析电子机械制动系统在应用中的纵向附着系数与滑移率变化,可以发现其利用附着系数最大为0.9,且该系数受滑移率影响,0.9的附着系数正对应0.72的滑移率。总的来说,仿真分析直挂证明了本文研究的电子机械制动系统的实用性、可靠性以及稳定性,研究的价值也能够由此得到保障。
结论
综上所述,汽车电子机械制动系统在我国未来汽车工业发展中将占据重要地位。而在此基础上,本文涉及的总体设计思路、系统硬件设计、系统软件设计、动力学模型建立、仿真分析等具体内容,则证明了研究的实践价值。因此,在相关领域的理论研究和实践探索中,本文内容便能够发挥不俗的参考作用。
参考文献
[1]武文娟,陈俊武. 汽车电子机械制动系统执行机构的优化设计[J/OL]. 中国设备工程,2016,15(11):238+245.
[2]陈东强,温佐礼. 汽车电子机械制动系统的研究[J]. 科技创新导报,2017,14(11):129+131.
[3]张柯. 电动汽车电子机械制动系统的研究与设计[J]. 橡塑技术与装备,2016,42(02):98-100.
[4]荆志远. 汽车电子机械制动系统设计与仿真[J]. 科技风,2015,(18):37.
